
新的S7-200 SMART CPU支持PID自整定功能,在STEP 7-Micro/WIN SMART中也添加了PID調(diào)節(jié)控制面板。
用戶可以使用用戶程序或PID調(diào)節(jié)控制面板來啟動自整定功能。在同一時間最多可以有8個PID回路同時進(jìn)行自整定。PID調(diào)節(jié)控制面板也可以用來手動調(diào)試?yán)习姹镜模ú恢С諴ID自整定)CPU的PID控制回路。
用戶可以根據(jù)工藝要求為調(diào)節(jié)回路選擇快速響應(yīng)、中速響應(yīng)、慢速響應(yīng)或極慢速響應(yīng)。PID自整定會根據(jù)響應(yīng)類型而計算出最優(yōu)化的比例、積分、微分值,并可應(yīng)用到控制中。
STEP 7-Micro/WIN SMART中提供了一個PID控制面板,可以用圖形方式監(jiān)視PID回路的運行,另外從面板中還可以啟動、停止自整定功能。

圖1. PID調(diào)節(jié)控制面板
在圖1中:

圖中:
要使用PID調(diào)節(jié)控制面板,PID編程必須使用PID向?qū)瓿伞?
啟動自整定先決條件:
在開始PID自整定調(diào)整前,整個PID控制回路必須工作在相對穩(wěn)定的狀態(tài)(穩(wěn)定的PID是指過程變量接近設(shè)定值,輸出不會不規(guī)則的變化,且回路的輸出值在控制范圍中心附近變化。)
理想狀態(tài)下,自整定啟動時,回路輸出值應(yīng)該在控制范圍中心附近。 自整定過程在回路的輸出中加入一些小的階躍變化,使得控制過程產(chǎn)生振蕩。 如果回路輸出接近其控制范圍的任一限值,自整定過程引入的階躍變化可能導(dǎo)致輸出值超出最小或最大范圍限值。 如果發(fā)生這種情況,可能會生成自整定錯誤條件,當(dāng)然也會使推薦值并非最優(yōu)化。
第二步:打開PID調(diào)節(jié)控制面板,設(shè)置PID回路調(diào)節(jié)參數(shù)
在Micro/WIN SMART在線的情況下,從主菜單工具中點擊 進(jìn)入PID調(diào)節(jié)控制面板中。
進(jìn)入PID調(diào)節(jié)控制面板中。
在PID調(diào)節(jié)面板的h.區(qū)查看已選擇的PID回路號,在e.區(qū)啟動手動調(diào)節(jié),調(diào)節(jié)PID參數(shù)并點擊更新,使新參數(shù)值起作用,監(jiān)視其趨勢圖,根據(jù)調(diào)節(jié)狀況改變PID參數(shù)直至調(diào)節(jié)穩(wěn)定。
- 使PID調(diào)節(jié)器基本穩(wěn)定,輸出、反饋變化平緩,并且使反饋比較接近給定
- 設(shè)置合適的給定值,使PID調(diào)節(jié)器的輸出遠(yuǎn)離趨勢圖的上、下坐標(biāo)軸,以免PID自整定開始后輸出值的變化范圍受限制
第三步:在e.區(qū)點擊高級選項按鈕,設(shè)定PID自整定選項。如果不是很特殊的系統(tǒng),也可以不加理會。

圖3. 設(shè)置PID自整定高級選項
在此允許你設(shè)定下列參數(shù):
第四步:在手動將PID調(diào)節(jié)到穩(wěn)定狀態(tài)后,即過程值與設(shè)定值接近,且輸出沒有不規(guī)律的變化,并最好處于控制范圍中心附近。此時可點擊e.區(qū)內(nèi)的啟動按鈕啟動PID自整定功能,這時按鈕變?yōu)橥V埂_@時只需耐心等待,系統(tǒng)完成自整定后會自動將計算出的PID參數(shù)顯示在e.區(qū)。當(dāng)按鈕再次變?yōu)閱訒r,表示系統(tǒng)已經(jīng)完成了PID自整定。
第五步:如果用戶想將PID自整定的參數(shù)應(yīng)用到當(dāng)前PLC中,則只需點擊更新PLC。
完成PID調(diào)整后,最好下載一次整個項目(包括數(shù)據(jù)塊),使新參數(shù)保存到CPU的EEPROM中。
通過查詢系統(tǒng)手冊中 《PID回路和整定》章節(jié),PID 回路表占用的存儲器 V 區(qū)地址中所代表功能,見表1-PID 回路表:
紅色:PID 自整定使能位、進(jìn)行位、完成位、整定結(jié)果錯誤代碼
藍(lán)色:PID 自整定結(jié)束后的建議參數(shù)(含增益、積分、微分)
黃色:PID 運行時的增益積分微分,注意采樣時間僅在組態(tài)界面設(shè)置,不可隨意修改
綠色:PID 自整定高級選項設(shè)置(關(guān)于動態(tài)響應(yīng)的,默認(rèn)為快速響應(yīng))

表1. PID 回路表
PID 回路表中的 AT 控制字、狀態(tài)字、配置字節(jié)詳細(xì)描述見表 2:
ACNTL:Vx.0=1啟動 PID 自整定;Vx.0=0停止 PID 自整定
ASTAT:Vv.0=1自整定正在進(jìn)行;Vv.0=0自整定沒有進(jìn)行
ARES :Vm.7=1自整定完成;Vm.7=0自整定未完成。包含自整定結(jié)果代碼,方便錯誤查詢
ACNFG:Vn.2 和 3=動態(tài)響應(yīng)設(shè)置
注意:自整定完成位必須為 0,自整定才能啟動
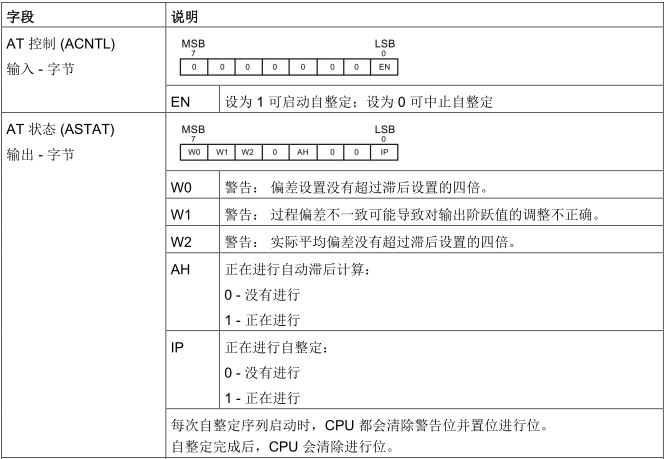
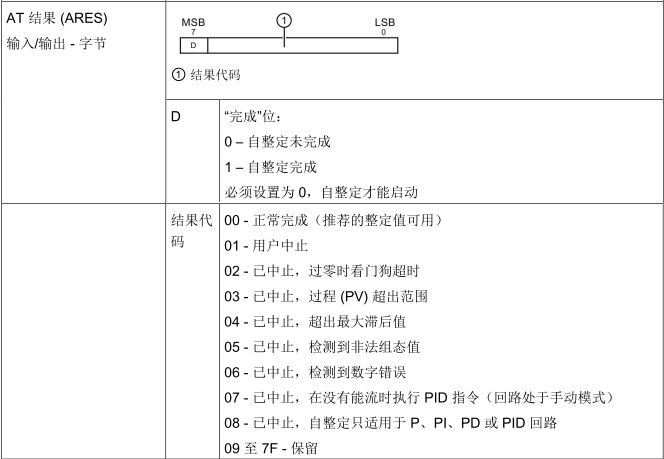
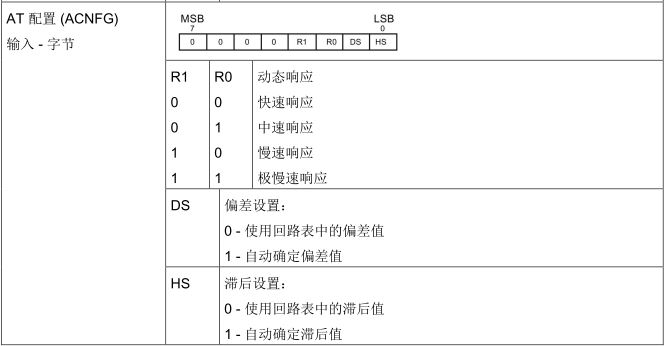
表2. PID 回路表控制字、狀態(tài)字、配置字節(jié)說明
PID 回路表中是針對于 PID 存儲器分配的首地址偏移量,若直接運用自整定部分控制字,具體地址可參考數(shù)據(jù)塊 PIDx_DATA,如下圖 4:

圖4. PID 回路符號表
對于 PID 自整定部分的編程思路簡略如下:
在觸摸屏上按鈕直接連接(如 M1.0),當(dāng)按鍵按下時置位 PID 自整定使能位,啟動自整定。
只有 Vm.7=0 時才能啟動自整定功能,當(dāng) Vx.0=1 啟動自整定后,Vm.7=1 表示自整定完成,期間可以使用 Vx.0=0 隨時中止自整定過程。
通過程序中判定當(dāng) Vm.7=1 時表示 PID 整定已完成,將整定建議的參數(shù)傳送(move)到 PID 運行參數(shù)里。
取出 PID 整定結(jié)果字節(jié)后七位,作為自整定狀態(tài)和錯誤信息,如有錯誤可依此分析錯誤原因。具體代碼表示含義參見表 2。

圖5. PID 整定部分編程思路
通過程序啟動 PID 自整定(Vx.0=1)后,可以使用 PID 整定控制面板監(jiān)視 PID 回路的運行,如下圖:
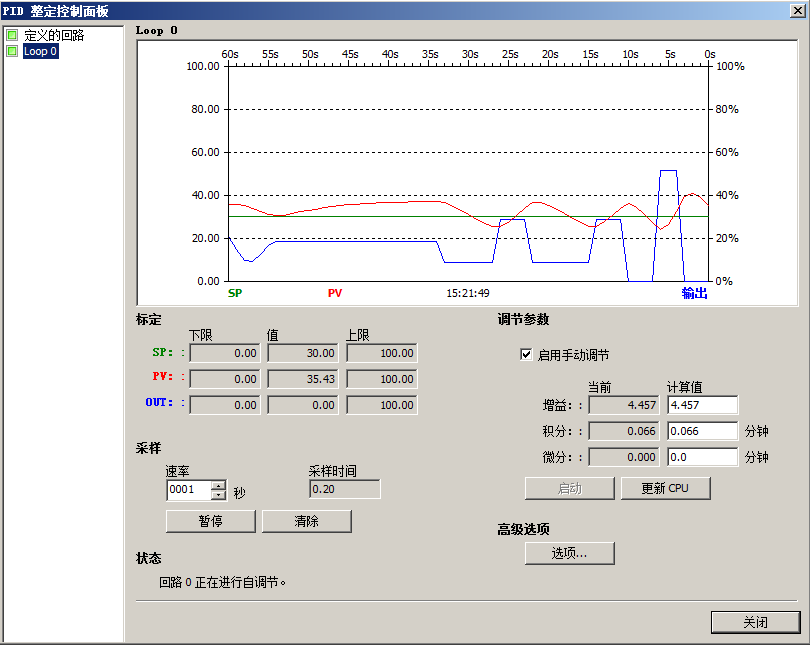
圖6. PID 整定控制面板
當(dāng)自整定完成(Vm.7=1)后,程序執(zhí)行將整定后的參數(shù)更新到 PID 參數(shù)中。為保證參數(shù)斷電后仍保持,建議在系統(tǒng)塊-〉CPU屬性-〉保持范圍中設(shè)置屬性,如下圖所示:
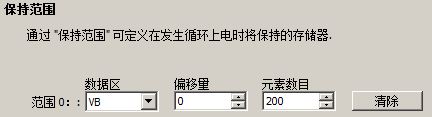
圖7. 系統(tǒng)塊中的保持范圍設(shè)置
為了更好地理解 PID 參數(shù)設(shè)置的編程,可參考下面的例程。
使用環(huán)境: STEP 7 Micro/WIN SMART V2.2
實現(xiàn)功能: 通過變量使能PID自整定
注意: 該例程僅設(shè)置一路 PID 向?qū)渲茫阌谡{(diào)試使用了 PID 被控對象的仿真庫。
![]() 注意:此指令庫/程序的作者和擁有者對于該軟件的功能性和兼容性不負(fù)任何責(zé)任。使用該軟件的風(fēng)險完全由用戶自行承擔(dān)。由于它是免費的,所以不提供任何擔(dān)保,錯誤糾正和熱線支持,用戶不必為此聯(lián)系西門子技術(shù)支持與服務(wù)部門。
注意:此指令庫/程序的作者和擁有者對于該軟件的功能性和兼容性不負(fù)任何責(zé)任。使用該軟件的風(fēng)險完全由用戶自行承擔(dān)。由于它是免費的,所以不提供任何擔(dān)保,錯誤糾正和熱線支持,用戶不必為此聯(lián)系西門子技術(shù)支持與服務(wù)部門。
電話:13916183699
郵箱:13916183699@139.com
網(wǎng)址:http://www.nabaiqian.cn
地址:中國上海市青浦區(qū)北青公路7171號111-112室


