
西門子PLCsmart200-PID 自動(dòng)/手動(dòng)調(diào)節(jié)的無(wú)擾動(dòng)切換
有些工程項(xiàng)目中可能需要根據(jù)工藝要求在不同的時(shí)刻投入、或者退出 PID 自動(dòng)控制;退出 PID 自動(dòng)控制時(shí),控制器的輸出部分可以由操作人員直接手動(dòng)控制。這就是所謂的 PID 手動(dòng)/自動(dòng)切換。
PID 控制處于自動(dòng)方式時(shí),PID 控制器(S7-200 SMART 中的 PID 調(diào)節(jié)功能)會(huì)按照 PID 算法,自動(dòng)通過(guò)輸出的作用使過(guò)程反饋值跟隨給定值變化,并保持穩(wěn)定。這是一個(gè)自動(dòng)的閉環(huán)控制系統(tǒng)。操作人員可以根據(jù)現(xiàn)場(chǎng)工藝的要求,改變給定(即設(shè)定值)的值。
PID 控制處于手動(dòng)方式時(shí),PID 控制器不再起自動(dòng)計(jì)算的作用。這時(shí),控制回路的輸出是由操作人員手動(dòng)控制、調(diào)整,由操作人員觀察現(xiàn)場(chǎng)的控制效果,從而構(gòu)成人工閉環(huán)控制。
所謂 PID 自動(dòng)/手動(dòng)控制,就是看控制系統(tǒng)的輸出是由 PID 控制器自動(dòng)控制,還是由操作人員手動(dòng)控制。
有些控制系統(tǒng)的執(zhí)行機(jī)構(gòu)不能承受較大的沖擊,這就要求在進(jìn)行 PID 自動(dòng)/手動(dòng)切換時(shí),保持控制輸出的穩(wěn)定。這就是要求無(wú)擾動(dòng)切換。
為了達(dá)到 PID 自動(dòng)/手動(dòng)控制的無(wú)擾動(dòng)切換,需要在編程時(shí)注意一些相關(guān)事項(xiàng)。下面分別就直接使用 PID 指令編程,和使用 PID 向?qū)Ь幊虄煞N情況作一介紹。
直接使用 PID 指令塊編寫 PID 控制程序時(shí),可以簡(jiǎn)單地使用“調(diào)用/不調(diào)用”指令的方式控制自動(dòng)/手動(dòng)模式。因?yàn)?PID 指令本身已經(jīng)具有實(shí)現(xiàn)無(wú)擾動(dòng)切換的能力,此時(shí)在 PID 指令控制環(huán)節(jié)之外編程沒(méi)有多大必要。
PID 指令的 EN 輸入端使能(為“1”)時(shí),我們認(rèn)為是自動(dòng)控制模式;EN 輸入端未使能(為“0”)時(shí),我們認(rèn)為是手動(dòng)控制模式。
PID 指令本身有一個(gè)“能流歷史狀態(tài)位”,以記錄指令的狀態(tài)切換。在 EN 端從“0”變?yōu)椤薄?”時(shí),PID 指令認(rèn)為這是從“手動(dòng)”模式向“自動(dòng)”模式切換。PID 指令此時(shí)會(huì)自動(dòng)執(zhí)行一系列動(dòng)作,以配合無(wú)擾動(dòng)切換:
使設(shè)定值等于當(dāng)前反饋值可以避免出現(xiàn)偏差,使之不存在調(diào)整的要求;當(dāng)然如果有工藝要求,也可以后續(xù)調(diào)整設(shè)定值。其他的動(dòng)作都是為了使 PID 在后續(xù)的操作中不改變輸出的值。
在編程時(shí)要注意:
使用 PID 指令向?qū)Ь幊虝r(shí),指令向?qū)?huì)自動(dòng)調(diào)用 PID 指令,并且編寫外圍的控制變量標(biāo)準(zhǔn)化換算、定時(shí)采樣等功能。用戶在使用 PID 指令向?qū)r(shí),需要在用戶程序中用 SM0.0 調(diào)用指令向?qū)傻淖映绦颍ㄈ?PIDx_CTRL 子程序)。PID 向?qū)Э梢陨蓭ё詣?dòng)/手動(dòng)切換功能的子程序,這個(gè)子程序使用一個(gè)數(shù)字量點(diǎn)為“1”、“0”的狀態(tài)來(lái)控制是否投入 PID 自動(dòng)控制。
到目前為止(STEP 7-Micro/WIN SMART),使用 PID 向?qū)傻淖映绦驎r(shí),由于用戶程序不能直接使用 PID 指令,它的無(wú)擾切換能力因?yàn)楦袅送鈿ぷ映绦颍允艿搅司窒蕖H绻麑?duì)無(wú)擾切換要求比較嚴(yán)格,需要另外編一些程序加以處理。
考察如下 PID 控制子程序。
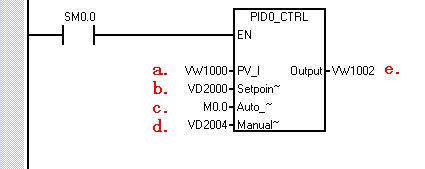
圖 1. PID 向?qū)傻闹噶?
圖中:
要實(shí)現(xiàn)無(wú)擾動(dòng)切換,必須:
為此,可編寫類似下圖所示的程序,放在 PID 控制子程序之前:

圖 2. 無(wú)擾切換處理程序
圖中:
![]() 上述程序中的 Scale_I_to_R 就是量程變換指令庫(kù)中的子程序,如何將該指令庫(kù)導(dǎo)入到Micro/WIN SMART 中可參見(jiàn)如何將Micro/WIN 的庫(kù)文件導(dǎo)入到Micro/WIN SMART中。這是為了解決過(guò)程反饋與設(shè)定值之間的換算問(wèn)題。用戶也可以自己編程換算,或者根據(jù)反饋與給定的取值范圍決定是否需要換算。
上述程序中的 Scale_I_to_R 就是量程變換指令庫(kù)中的子程序,如何將該指令庫(kù)導(dǎo)入到Micro/WIN SMART 中可參見(jiàn)如何將Micro/WIN 的庫(kù)文件導(dǎo)入到Micro/WIN SMART中。這是為了解決過(guò)程反饋與設(shè)定值之間的換算問(wèn)題。用戶也可以自己編程換算,或者根據(jù)反饋與給定的取值范圍決定是否需要換算。
為了更好地理解 PID向?qū)У淖詣?dòng)/手動(dòng)無(wú)擾切換的使用,可參考下面的例程。
使用環(huán)境: STEP 7 Micro/WIN SMART V2.3.2
實(shí)現(xiàn)功能: PID向?qū)У淖詣?dòng)/手動(dòng)無(wú)擾切換
![]() PID向?qū)ё詣?dòng)/手動(dòng)無(wú)擾切換
PID向?qū)ё詣?dòng)/手動(dòng)無(wú)擾切換
本例程僅供參考,程序中的CPU版本、類型可能與用戶實(shí)際使用不同,用戶可能需要先對(duì)例子程序做修改和調(diào)整,才能將其用于測(cè)試。本例程的作者和擁有者對(duì)于該例程的功能性和兼容性不負(fù)任何責(zé)任,使用該例程的風(fēng)險(xiǎn)完全由用戶自行承擔(dān)。由于它是免費(fèi)的,所以不提供任何擔(dān)保,錯(cuò)誤糾正和熱線支持,用戶不必為此聯(lián)系西門子技術(shù)支持與服務(wù)部門。
電話:13916183699
郵箱:13916183699@139.com
網(wǎng)址:http://www.nabaiqian.cn
地址:中國(guó)上海市青浦區(qū)北青公路7171號(hào)111-112室


