
S7-200 SMART 斷電重啟后由于初始化指令的執行,當前位置會復位為0。要使S7-200 SMART運動控制的當前位置值在CPU斷電重啟后依然保持,可以通過以下的編程來實現。
在此以通過向導生成的運動控制 “ 軸 0 ” 為例來說明如何在 S7-200 SMART CPU 斷電后保持 “ 軸 0 ” 的當前位置值,具體可參考以下三個部分的編程來實現 :
1,設置兩個個斷電保持區域:VD1000、VD1004,如圖1所示:
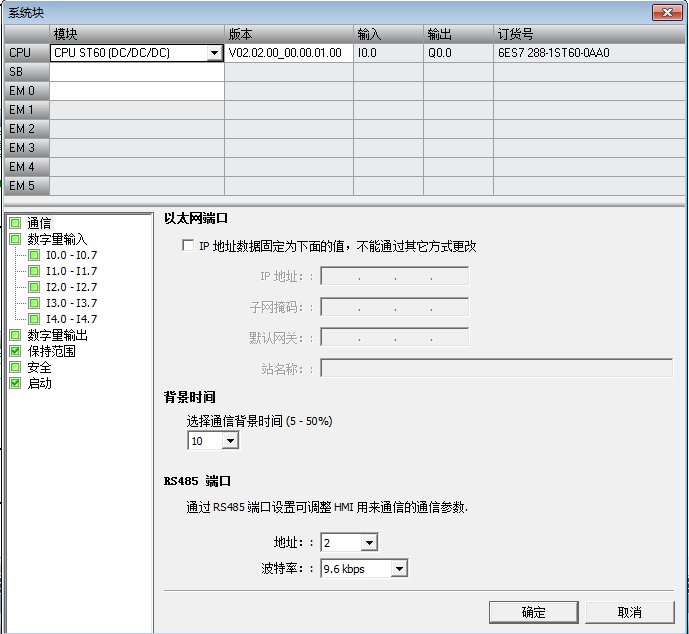
圖1. 設置斷電保持
2,將當前值位置值在第一個掃面周期內傳送到保持位置VD1004內,如圖2所示:
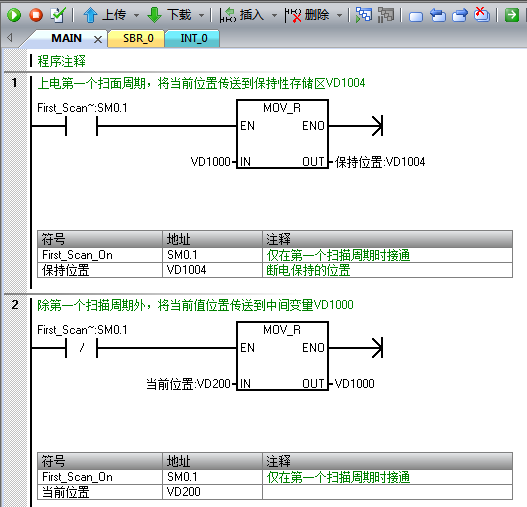
圖2. 當前位置保持
3,當初始化完成后,用初始化指令 “ AXIS0_CTRL ” 的DONE位來觸發修改位置指令 “ AXIS0_CTRL ”,將保持位置VD1000裝載到當前位置VD200,如圖3所示:
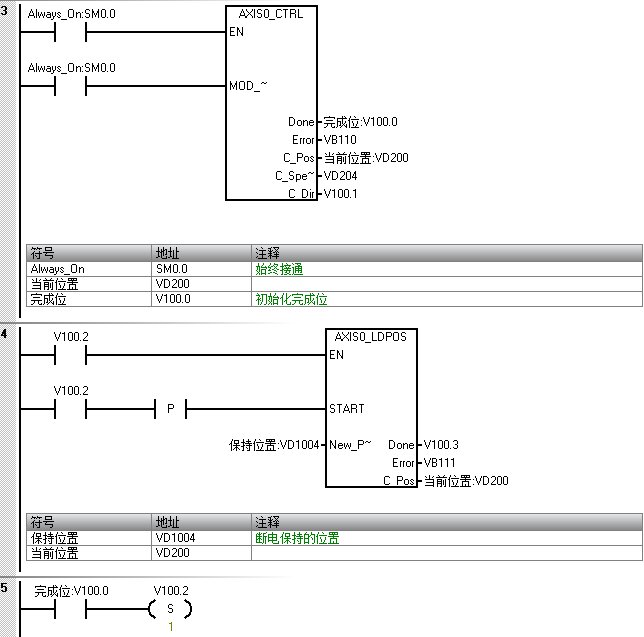
圖3. 裝載當前位置
所需條件:
1、軟件版本:STEP 7-Micro/WIN SMART V2.3
2、SMART CPU固件版本:V2.3(其他版本亦可)
3、通訊硬件:TP電纜(以太網電纜)
所實現的功能:
在S7-200 SMART CPU斷電重啟后保持運動控制的當前位置值。
本例程僅供參考,程序中的CPU版本、類型可能與用戶實際使用不同,用戶可能需要先對例子程序做修改和調整,才能將其用于測試。本例程的作者和擁有者對于該例程的功能性和兼容性不負任何責任,使用該例程的風險完全由用戶自行承擔。由于它是免費的,所以不提供任何擔保,錯誤糾正和熱線支持,用戶不必為此聯系西門子技術支持與服務部門。
電話:13916183699
郵箱:13916183699@139.com
網址:http://www.nabaiqian.cn
地址:中國上海市青浦區北青公路7171號111-112室


